库卡
KUKAVARPROXY
通过KUKAVARPROXY协议连接库卡C2 、C4 、C5系列机器人。
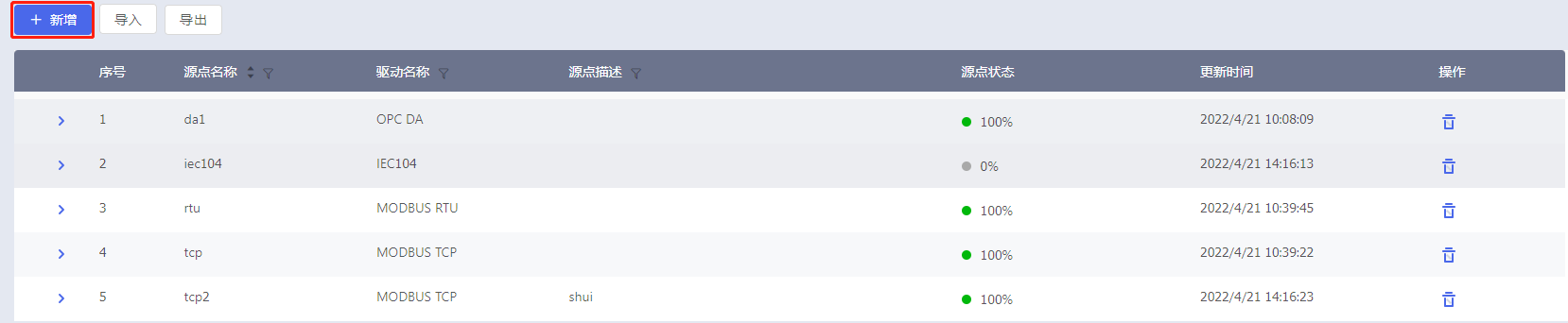
新增源点
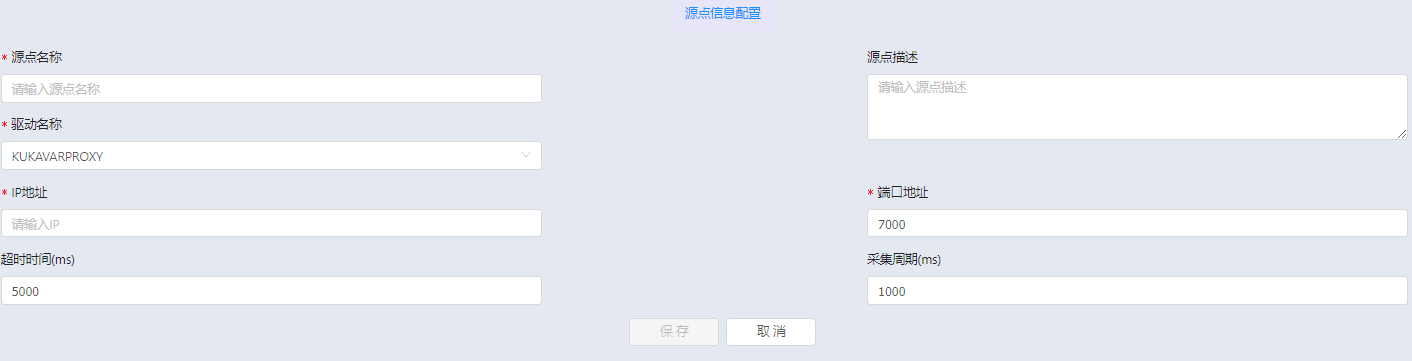
步骤1:点击源点管理信息界面的〔+新增〕按钮,展开源点信息配置。
步骤2:输入源点名称、描述,驱动名称选择KUKAVARPROXY,系统会根据选择的驱动名称展开该驱动需要输入的信息。
| 参数名 | 含义 | 说明 |
|---|---|---|
| *IP地址 | 设备IP地址 | |
| *端口地址 | 端口号 | 默认值7000 |
| 超时时间 | 连接设备超时的最长等待时间 | 单位毫秒ms |
| 采集周期 | 数据采集周期 | 配置数据采集的时间周期,单位ms,默认值1000 |
新增标签
步骤1:点击标签管理信息界面的〔+新增〕按钮,展开标签基础属性。
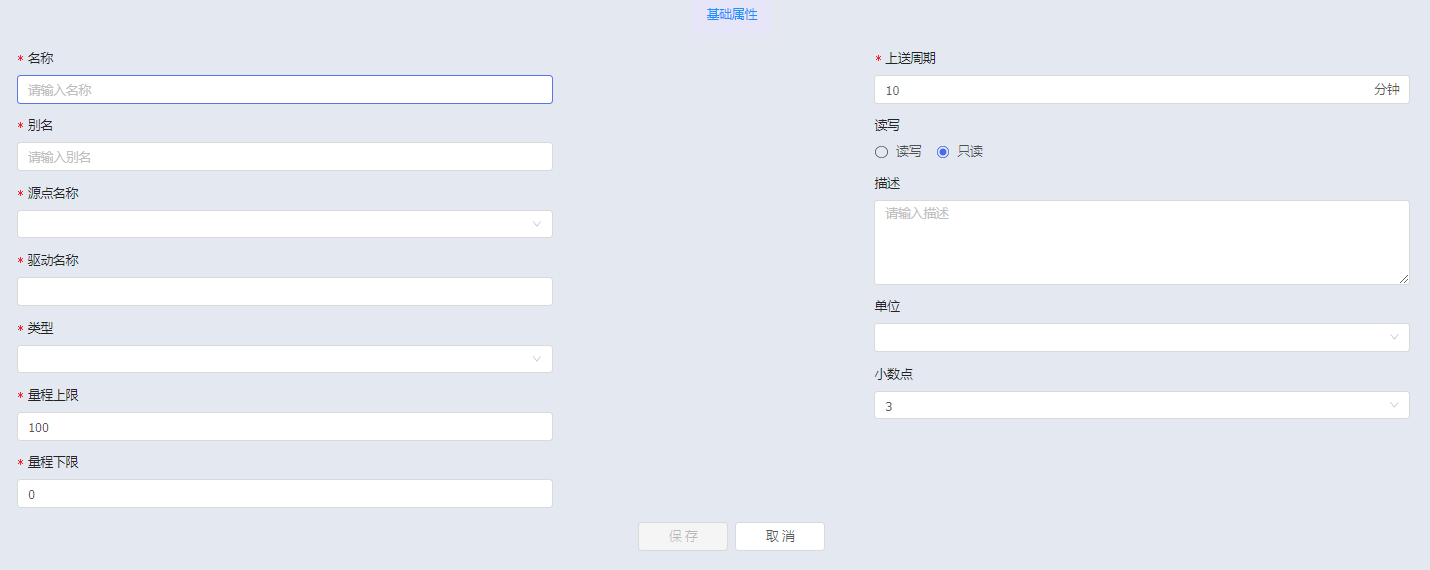
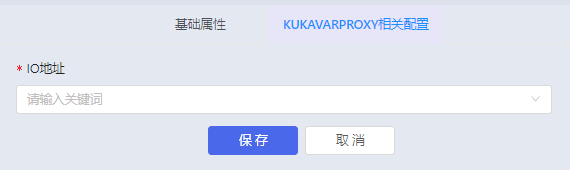
步骤2:基础属性内容输入完成后,系统自动增加相关配置属性,用于标签与底层数据的连接点设置。选择对应的IO地址,点击〔保存〕按钮,配置完成。
| 序号 | IO地址 | 数据类型 | 列表显示 |
|---|---|---|---|
| 1 | 程序倍率 | string | $OV_PRO |
| 2 | 轴的设定坐标 | string | $AXIS_ACT |
| 3 | 轴的实际坐标 | string | $AXIS_ACT_MEAS |
| 4 | 当前直角坐标机器人位置 | string | $POS_ACT |
| 5 | 测量直角坐标机器人位置 | string | $POS_ACT_MES |
| 6 | 当前操作模式 | string | $MODE_OP |
| 7 | 各轴实际电流 | string | $CURR_ACT【】 |
| 8 | A1轴实际电流 | string | $CURR_ACT【1】 |
| 9 | A2轴实际电流 | string | $CURR_ACT【2】 |
| 10 | A3轴实际电流 | string | $CURR_ACT【3】 |
| 11 | A4轴实际电流 | string | $CURR_ACT【4】 |
| 12 | A5轴实际电流 | string | $CURR_ACT【5】 |
| 13 | A6轴实际电流 | string | $CURR_ACT【6】 |
| 14 | E1轴实际电流 | string | $CURR_ACT【7】 |
| 15 | E2轴实际电流 | string | $CURR_ACT【8】 |
| 16 | E3轴实际电流 | string | $CURR_ACT【9】 |
| 17 | E4轴实际电流 | string | $CURR_ACT【10】 |
| 18 | E5轴实际电流 | string | $CURR_ACT【11】 |
| 19 | E6轴实际电流 | string | $CURR_ACT【12】 |
| 20 | 当前电机转速 | string | $VEL_AXIS_ACT【】 |
| 21 | A1轴当前电机转速 | string | $VEL_AXIS_ACT【1】 |
| 22 | A2轴当前电机转速 | string | $VEL_AXIS_ACT【2】 |
| 23 | A3轴当前电机转速 | string | $VEL_AXIS_ACT【3】 |
| 24 | A4轴当前电机转速 | string | $VEL_AXIS_ACT【4】 |
| 25 | A5轴当前电机转速 | string | $VEL_AXIS_ACT【5】 |
| 26 | A6轴当前电机转速 | string | $VEL_AXIS_ACT【6】 |
| 27 | E1轴当前电机转速 | string | $VEL_AXIS_ACT【7】 |
| 28 | E2轴当前电机转速 | string | $VEL_AXIS_ACT【8】 |
| 29 | E3轴当前电机转速 | string | $VEL_AXIS_ACT【9】 |
| 30 | E4轴当前电机转速 | string | $VEL_AXIS_ACT【10】 |
| 31 | E5轴当前电机转速 | string | $VEL_AXIS_ACT【11】 |
| 32 | E6轴当前电机转速 | string | $VEL_AXIS_ACT【12】 |
| 33 | 运行状态 | string | $PRO_STATE |
| 34 | 程序名 | string | $PRO_NAME【】 |
| 35 | 当前工具坐标号 | string | $ACT_TOOL |
| 36 | 当前负载 | string | $LOAD |
| 37 | 引起停机的报警信息 | string | $STOPMESS |